* Install your Pi with the instructions here https://github.com/jancelin/pi-gen_RTKbase/releases/tag/BaseGNSS-RPi-2.3.1 (It is an installation of this project: https://github.com/Stefal/rtkbase).
* Install your Pi with the instructions here https://github.com/jancelin/pi-gen_RTKbase/releases/tag/BaseGNSS-RPi-2.3.1 (It is an installation of this project: https://github.com/Stefal/rtkbase).
** To begin with, you must install using an Ethernet cable
** To begin with, you must install using an Ethernet cable
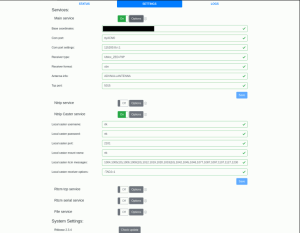
* Configure - @ow has a nice documentation of working settings - see image to the right
*You should be able to get the GUI on-screen and see the satellites going green
*If you do not see ANY signal in the GUI from the RTK module, you may have the wrong config in it.
**One that seems to be working is https://github.com/Stefal/rtkbase/blob/master/receiver_cfg/U-Blox_ZED-F9P_rtkbase.cfg
**You can send it to the RTK module by SSH'ing to the Pi running the RTK base, cloning https://github.com/Stefal/rtkbase and running <code>rtkbase/tools/set_zed-f9p.sh /dev/ttyACM0 57600 rtkbase/receiver_cfg/U-Blox_ZED-F9P_rtkbase.cfg</code> (optionally replace ttyACM0 with the correct device for you) [[File:Settings for RTK GPS base.png|thumb]]Info on how to SSH to the Pi running RTK base: https://github.com/jancelin/pi-gen_RTKbase/releases/tag/BaseGNSS-RPi-2.3.1
* That is really it
* That is really it
=== Verifying base station NTRIP configuration ===
If you want to ensure your base station is casting NTRIP information correctly, you can verify this using any other computer on the local network with the str2str (part of RTKLib) and gpsdecode (part of gpsd) commands.
Connect to the NTRIP caster using the following command, this should output RTCM3 messages to the console:
* ntrip_host = Local caster hostname or IP address
* ntrip_port = Local caster port
* ntrip_mount = Local caster mount name
Latest revision as of 07:03, 19 May 2022
Here is a very simple set-up of a working RTK-GPS base station for the OpenMower project.
The purpose is to make base RTK GPS station that can broadcast base GPS RTK information on your local network to give OpenMower the reference data for accurate GPS localization.
Disclaimer
This material is provided as-is and free of charge. No guarantees of any kind are made that the information contained herein is exact or correct or does not violate any local regulations or cause any security risk. Any use you make of any information given here is at your own discretion and risk.
If you want to ensure your base station is casting NTRIP information correctly, you can verify this using any other computer on the local network with the str2str (part of RTKLib) and gpsdecode (part of gpsd) commands.
Connect to the NTRIP caster using the following command, this should output RTCM3 messages to the console: